Robotics
5-DOF Robotic Cake Icing System
← Back to Projects
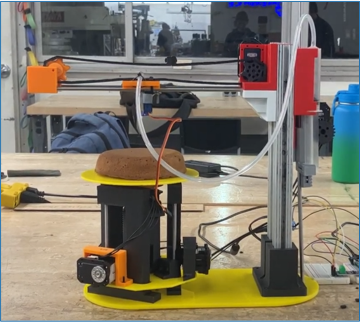
Designed and fabricated a 5-DOF robotic manipulator with Cartesian motion, rotation, and syringe-based extrusion using custom 3D-printed components. Developed and validated forward/inverse kinematics, workspace analysis, and trajectory planning under height and clearance constraints.