Bio-Inspired Robotics
2-DOF Gantry for Bio-Inspired Eel Robot
← Back to Projects
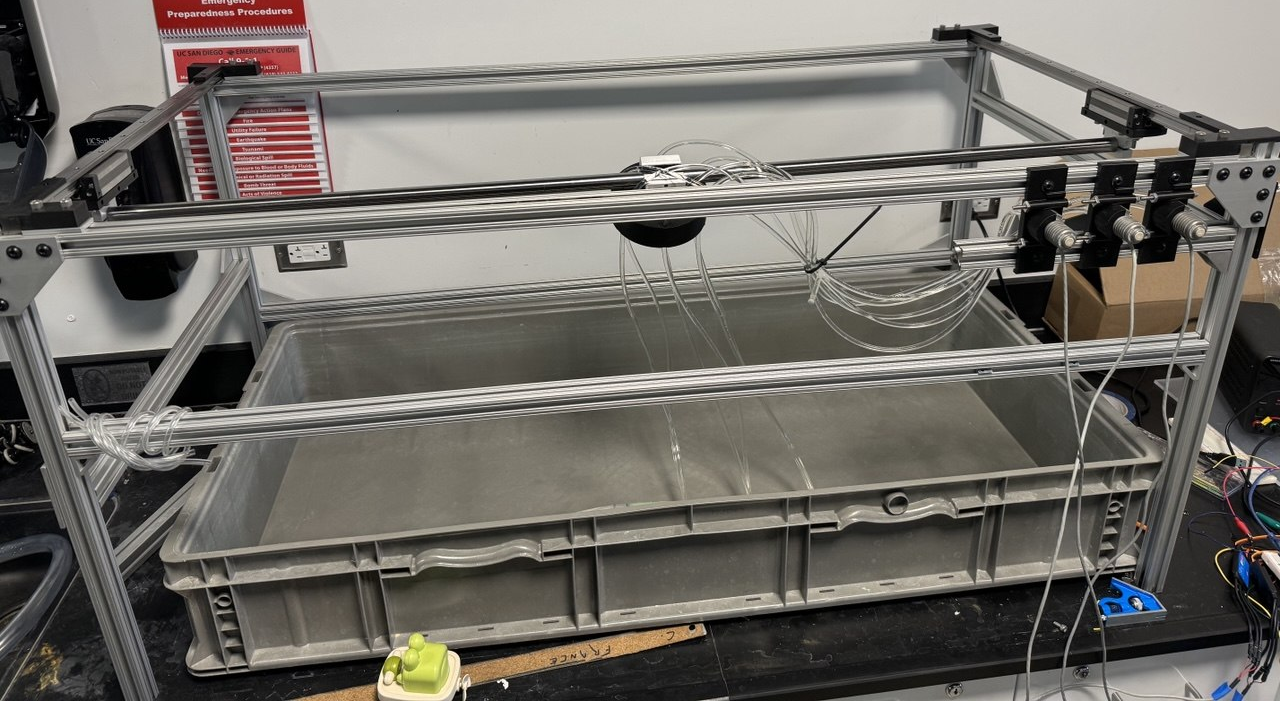
Designed a 2-DOF gantry enabling smooth planar motion for a bio-inspired eel robot during locomotion experiments. Attenuated >90% of vibration transmission via structural damping; optimized low-friction tube-routing.